 智能制造网APP
智能制造网APP
 智能制造网手机站
智能制造网手机站
 智能制造网小程序
智能制造网小程序
 智能制造网官微
智能制造网官微
 智能制造网服务号
智能制造网服务号









水陆两栖移动机器人
水陆两栖移动机器人是一种能够在陆地和水中行驶的大型全地形无人地面车辆。它可以处理恶劣的环境,其坚固的建筑,低地面压力,牵引轮胎,这使得柔软的土壤,植被,厚泥浆,陡峭的等级轻松流动。
有效载荷安装板和可访问的电源和通信端口允许Warthog容易地用传感器、机械手和其他有效载荷定制,以适应各种各样的机器人应用在采矿、农业和环境监测中的应用
特点:
多变性和多功能:
Warthog被设计成没有其他UGV的地方。它坚固耐用,重量轻的钢和铝建造给它低地面压力和牵引力,以解决所有类型的困难地形,包括陡峭的坡度和软土。由于内置舱底泵和IP额定值为65,Warthog*水陆两栖,能够以4公里/小时的速度通过水路。
ROS 准备:
Warthog的车载PC源于开源机器人操作系统(ROS)的预安装和配置。提供丰富的文档、演示和教程,以及一个GaseBo的3D仿真模型,以帮助您快速启动和免除麻烦。
*可扩展性:
当研究改变时,你的硬件也应该改变。快速灵活地集成第三方传感器和操作器,具有灵活的有效载荷安装,易于访问电源和可重构I/O(以太网、USB、WiFi等)。移动机器人原型从来没有更快或更容易。
高性能性:
Warthog强大的传动系能够移动272公斤的有效载荷,并能在陆地上达到18公里/小时的速度。可选拖车挂钩提供足够的力量拖曳大量的有效载荷和工业标准工具容易。
功率可扩大性:
Warthog配有100Ah,48V密封的AGM铅酸电池组,它可以很容易升级到锂离子包,允许长达8小时的运行时间。内部5V,12V,24V和48V,独立融合的用户电源可以很容易地提供大功率饥饿的有效载荷,如机械手和农具数小时。
技术规格:
 |  |  |
参数:
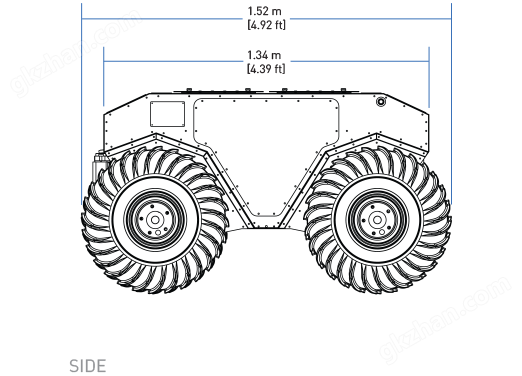
尺寸:1520x1380x830mm
基础重量:280Kg
车辆总量:590Kg
大负载:271Kg
大爬坡角:35~45°
大速度:陆地 18Km/h;水面 4Km/h
驱动/API:ROS Indigo
水陆两栖设计、基于ROS平台开发、高负载强劲动力、强大I/O接口扩展


